
GAMES104笔记-游戏引擎当中的动画技术
2D 动画技术
Sprite Animation

把动画每一个动作都记下来,循环播放也就变成了动画。
这种方法可以做到 3D 的效果吗,显然是可以的,请看 DOOM:
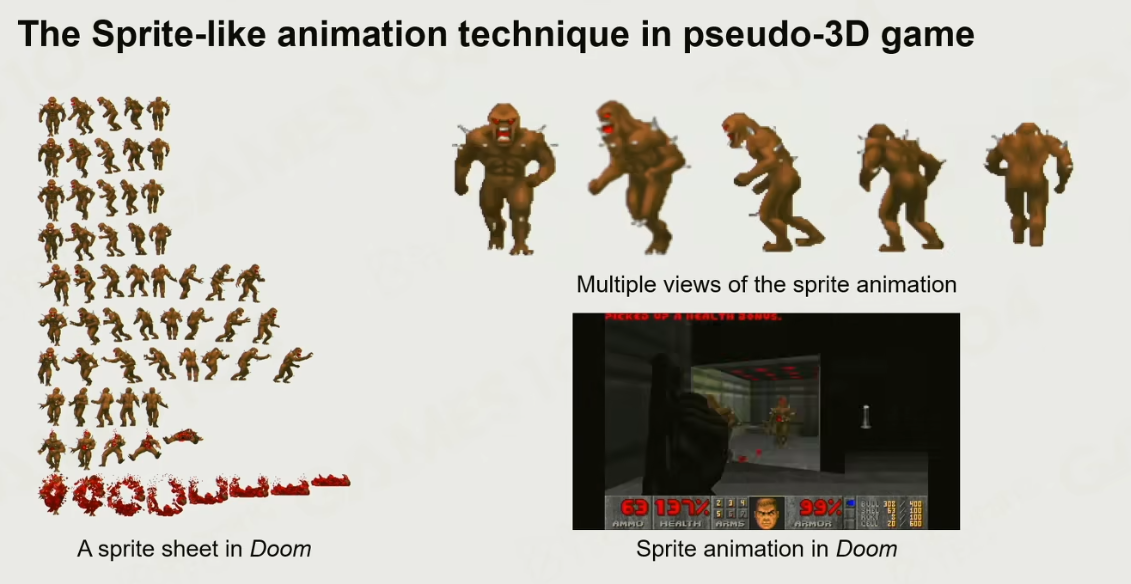
DOOM 在各个视角都做了一系列的动作,根据相机的位置,去播放不同的 sprite 动画。来呈现一个 3D 空间中的效果。
这种动画技术在目前的 3D 游戏当中并没有消失,比如粒子系统,有些爆炸以及爆炸带来的烟尘,也是一个个 sprite 序列化组成的。比如 《八方旅人》 当中也是使用 2D 人物在 3D 场景当中。
Live2D

live2d 会将一个大的整体分为很多小的图源,并且设置每个图源的深度,来描述其遮挡关系。接着会把每一个图片元素,生成一个控制网格,网格上可以随机加入控制点,当对控制点进行操作的时候,图片也就随之去变换。接着 k frame 去变换即可。
3D 动画技术
DOF(Degrees of Freedom)

指一个物体有多少个自由度,可以从多少个维度去变化。在三维空间当中的一个刚体是 6DOF 的:
- x, y, z 轴上平移
- 绕 x, y, z 轴旋转
Rigid Hierarchial Animation

将 mesh 和骨骼绑定,同时骨骼也是一个树状结构的,因此叫 hierarchial,类似于皮影戏,去转动每个骨骼的关节。但是有一个问题:在骨骼动的时候,mesh 之间会相互穿插。
Per-vertex Animation
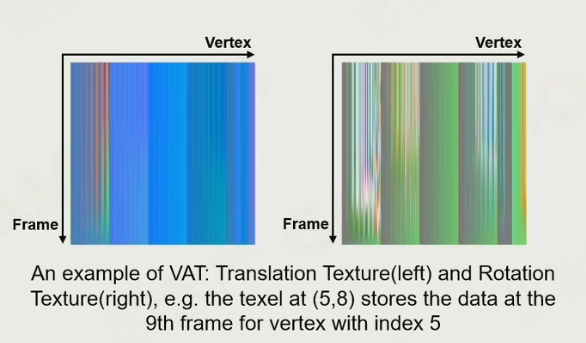
比如要做一个旗帜飘动的动画,如果要绑骨骼,工作量是非常大的。因此直接把每个顶点的位置存下来。此时一般会存两个 texture,texture 的横向轴就代表一个顶点,数轴就是存其每一帧的 offset。但是顶点变了法线也会改变,这时候就需要再存一下法线的 offset。这种 texture 一般是使用物理引擎离线模拟出来的。
3D Skinned Animation
如果有了一个模型网格,如何使其动起来:
- 制作一个在 bindind pose 下的网格模型
- 制作骨骼,内嵌在皮肤之下,与网格模型对齐
- 对其进行蒙皮,也就是对与网格模型的每个顶点,确定其受哪些骨骼的影响且受哪些骨骼的影响更大
- 制作 animation
Different Spaces
在这里先要提一下三个空间,动画系统当中的所有计算都是在其各自的空间当中:
- Model Space:以模型自己为中心的坐标系,比如人面前 2 立方米的空间,其与 World Space 并不是应该简单的平移关系,因为坐标系的朝向也可能发生变化。
- Local Space:指的是每一根骨骼(关节点)之间存在平移和旋转,相对于 Model Space 又发生了变化。每个关节点的坐标系都是不同的。比如对于手指尖关节,需要根据根节点坐标系依次传递到手指尖,才能知道其在 World Space 当中的朝向
- World Space:世界坐标系
整个动画数据,实际上都是存储在 Local Space 当中的,把 Local Space 从根节点积分(累算)才能得到 Model Space 的数据。接着考虑角色自身的平移,旋转,才能得到其 World Space。这个角色才会被渲染。
在 Humaniod 这种形体建模的时候,一般是会将其起点设置在人的胯部(Pelvis),即脊椎的最后一块骨头上面。
Joint & Bone
此处需要明确一个概念,上面所说的一些骨骼,并不是指真正一条一条的骨骼,而是关节(Joint),两个关节之前定义了骨骼,实际上存储的是关节数据。因为关节连接了一个刚体的骨骼,当关节发生旋转或者平移的时候,骨骼也就随之变化。关节有很多自由度,但是骨骼是没有的,因为骨骼是两个关节联合在一起去定义的。比如:当小臂肌肉扭曲时,可以使用关节进行表达,但是无法使用骨骼去表达。
比如角色手里要拿一把斧头,就可以在其手部添加一个 Weapon Mount Joint 的关节点,所有武器都会被绑定到上面,看起来就像手里拿了武器。
一个模型有位于 Pelvis 的起点,同时也有一个 Root 关节,在 Humaniod 里面,一般是定义在两脚之间的位置。这是因为比如要表达一个角色跳跃的动作,然后离地高度设置为 0.5m,如果使用 Pelvis 来存储的花,其下蹲和跳跃都会改变离地高度,而离地是指角色脚到地面的高度,因此从其 Root 出发。
考虑一个动画绑定的场景,比如人骑在马上,人与马的动画是分开的,靠绑定其点 x, y, z 空间位置以及朝向,来实现两者对其。
Math of 3D Rotation
Euler Angle
欧拉角使用记录对 x, y, z 轴分别旋转的角度来记录旋转。但是欧拉角是 order dependency 的,比如沿着 x, y, z 轴分别旋转 $\theta$, $\beta$, $\gamma$。如果运算顺序不一样的,得到的角度也会是不一样的。
但是当 y 轴旋转 90° 以后,x 轴与 z 轴共轴,此时沿着 z 轴旋转,是没有任何意义的。此时欧拉角会退化,导致模型的旋转也是被锁死的。因此,假设空间当中存在两个旋转,需要在两个旋转之间插值时,使用欧拉角是存在很大的问题的。
Quaternion

在说四元数之前,先看看如何在笛卡尔坐标系当中使用复数表示二维空间的任意旋转。二维空间当中的任何旋转都可以表示为归一化的复数值:
对应到三角函数表示旋转时:
这是复数的向量表达形式:
这是复数的矩阵表达形式:
因此,如果要增加一个旋转 $\beta$,使用点乘公式即可,让复数的矩阵表达形式乘上复数的向量表达形式。

这里一张图都能看完,值得说一下的就是 i, j, k 的性质:
此性质在 ijk 不同的两两相乘都满足。


在使用四元数旋转的时候,是先将一个三维向量变成四元数,然后使用四元数 q 乘上这个构造出来的四元数,然后在乘上四元数 q 的逆。

同样,四元数也能直接表示出旋转矩阵,因为旋转的时候实际上也是得到一个3x3的矩阵,因为一些项会相互抵消,且关注的是旋转后结果的 x, y, z。因此无需计算 sin, cos。


